

【導(dǎo)讀】三點(diǎn)法又叫滯環(huán)比較法。是在擾動(dòng)觀察法的基礎(chǔ)上提出來(lái)的一種跟蹤方法。因?yàn)閿_動(dòng)法兩點(diǎn)比較,即目前的工作點(diǎn)與上一個(gè)擾動(dòng)點(diǎn)比較,判斷功率的變化方向從而決定工作電壓的移動(dòng)方向,除了造成較多的擾動(dòng)損失外,還可能發(fā)生誤判。
針對(duì)太陽(yáng)日照量并不會(huì)快速變化的特點(diǎn),多余的擾動(dòng)可能帶來(lái)較多的損失。滯環(huán)比較法可在日照量快速變化時(shí)并不跟隨著快速移動(dòng)工作點(diǎn)(也許只是干擾或判讀錯(cuò)誤),而是在日照量較穩(wěn)定時(shí)再跟蹤到最大功率點(diǎn),以減少擾動(dòng)損失。其原理詳述如下:
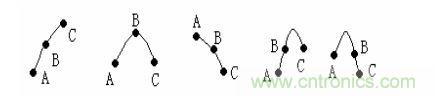
考慮太陽(yáng)能電池P-V特性曲線,在曲線頂點(diǎn)附近任意取三個(gè)點(diǎn)不同位置,可以得到上圖的這5中情況。設(shè)定一個(gè)標(biāo)志位flag,C點(diǎn)和B點(diǎn)比較,如果其中C點(diǎn)比較大或與B點(diǎn)相等,則flag=1;如果B點(diǎn)較小,則flag=-1;而A點(diǎn)與B點(diǎn)進(jìn)行比較有些不同,當(dāng)A點(diǎn)比B點(diǎn)大或者相等時(shí),flag=-1;如果A點(diǎn)比B點(diǎn)小時(shí),flag=1.當(dāng)三點(diǎn)比較完之后,flag=2,(上圖中第一種情況)工作電壓擾動(dòng)D值應(yīng)往右移動(dòng);當(dāng)flag=-2(上圖中的第三種情況)D值應(yīng)往左邊移動(dòng);當(dāng)flag=0(上圖第二種情況)表示到達(dá)頂點(diǎn),D值不發(fā)生改變?cè)贏,B,C三點(diǎn)功率的檢測(cè)上,先讀取B點(diǎn)的功率為基準(zhǔn)點(diǎn),增加一個(gè)△D讀取C點(diǎn)功率,再減少兩倍的△D讀取功率值作為A值。連續(xù)檢測(cè)三點(diǎn)功率值后在比較大小計(jì)算權(quán)位值,由權(quán)位值來(lái)判定基準(zhǔn)點(diǎn)應(yīng)該往C點(diǎn)移動(dòng),A點(diǎn)移動(dòng)或者不移動(dòng)。
當(dāng)照度正在變化時(shí),擾動(dòng)D又與A,B,C三點(diǎn)位置與flag值與上圖有些不同,可能出現(xiàn)下圖這些情況。
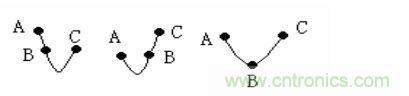
上圖三種排列方式在照度快速變化時(shí)可能會(huì)出現(xiàn),但 Tag 值都設(shè)置為零,即工作點(diǎn)并不會(huì)移動(dòng)。這樣就能有效的避免在最大功率點(diǎn)附近因擾動(dòng)造成的功率損失,當(dāng)光強(qiáng)發(fā)生突變時(shí),不盲目移動(dòng)工作點(diǎn),等日照穩(wěn)定后在追蹤。


